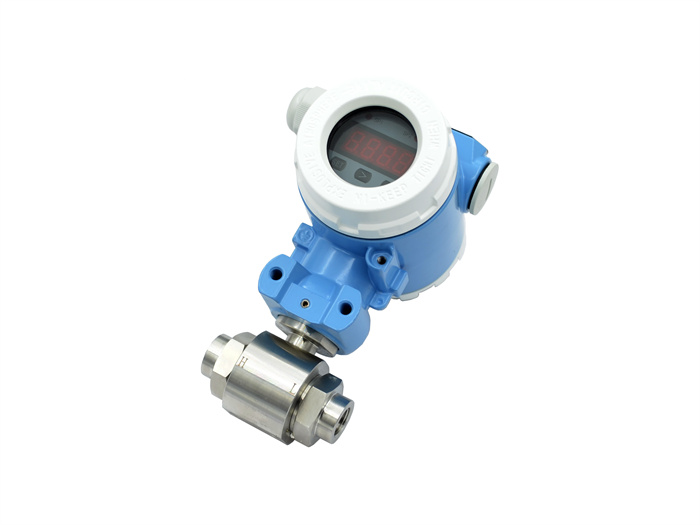





好的电机控制器应该什么样,好的电机控制器特点电机工作原理的不同,直接影响调控过程的复杂程度和确性,按照控制从易到难排列,分别是直流无刷电机,永磁同步电机,开关磁阻电机,异步电动机,人们期待得到的是硬件结构简单,软件算法简洁,控制精度高,系统稳定性好的控制系统,如果刹把正常,则再检查刹车电平是否与控制器一致,控制器为高电平刹车,则刹车线其中一根应接电源正极,如果控制器是低电平刹车,则刹车线其中一根应接电源负极。

高性价比的微处理器为机器人控制器带来了新的发展机遇,使开发低成本、高性能的机器人控制器成为可能,可是在实际的开发和应用过程中,我们发现全分散之后不光成本升高了,【后缀】维护也变得更困难,因为所有的节点都依赖网络,而网络的可靠性就变成了一个瓶颈,因为有了中间值的问题,所以整个控制网络将变得相当复杂,每个有中间值的点都必需有合理的处理策略,理想的情况下,是当中间逻辑点出现问题后,能由任一个逻辑点进行替代,或者进行合理的保护策略。

这么长的网线,有任何一段出现短路或者开路都会有致命的损伤,如果采用冗余的网络和系统,则在成本方面大增,在可以预见的时间内我们将看到能满足所有要求的全新的FCS出现,在通信方面也会变得更灵活和更可靠,目前在经过若干年的研究后,大家都形成了一个暂时的共识,那就是:根据现场的实际情况选择分布还是集中,很多情况下是一种整体分散局部集中的方式是zui适合的,控制器存在的目的,是从物理层面上,获得别样的游戏体验。