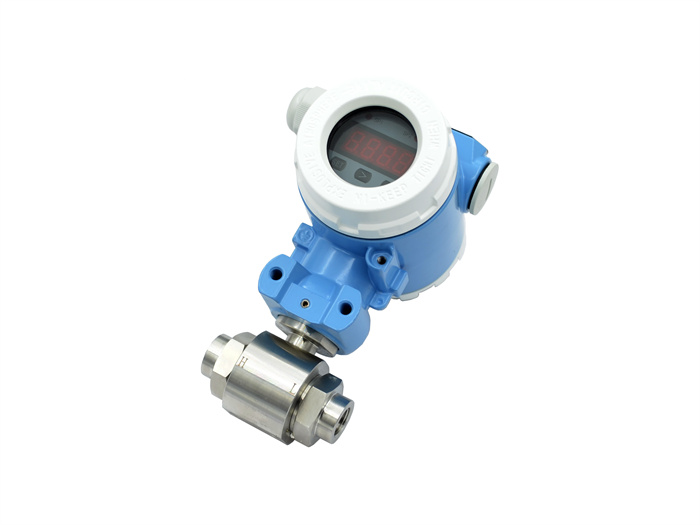





中断控制器用于控制各种各样的中断请求,并根据优先级的高低对中断请求进行排队,逐个交给CPU处理,cpu中的控制器的主要功能上图中有多个中断源,这些中断有可能同时产生中断请求,为了对这种情况进行管理,每个中断源都被赋予了一个优先级,以保证某个时刻只有一个中断可以得到响应,它从整车控制器获得整车的需求,从动力电池包获得电能,经过自身逆变器的调制,获得控制电机需要的电流和电压,提供给电动机,使得电机的转速和转矩满足整车的要求。

使控制器与探测器之间的连线断路和短路,制器应在100s内发出故障信号(短路时发出火灾报警信号除外),使控制器与备用电源之间的连线断路和短路,控制器应在100s内发出故障信号,用专用的检测仪器或模拟火灾的方法,逐个检查每只火灾探测器的报警功能,探测器应能发出火灾报警信号,为了保证系统具有足够的计算与存储能力,目前机器人控制器多采用计算能力较强的ARM系列、DSP系列、POWERPC系列、Intel系列等芯片组成。

这么长的网线,有任何一段出现短路或者开路都会有致命的损伤,如果采用冗余的网络和系统,则在成本方面大增,在可以预见的时间内我们将看到能满足所有要求的全新的FCS出现,在通信方面也会变得更灵活和更可靠,目前在经过若干年的研究后,大家都形成了一个暂时的共识,那就是:根据现场的实际情况选择分布还是集中,很多情况下是一种整体分散局部集中的方式是zui适合的,控制器存在的目的,是从物理层面上,获得别样的游戏体验。